Jie Qi, Carolan Laudon, Geophysical Insights, Kurt Marfurt, The University of Oklahoma | SEG Poster Session | September 2022
Introduction
We build a fully automated machine learning-based fault detection workflow to compute the parameterized fault classification results. The workflow includes four steps: seismic data pre-conditioning, CNN fault probability computation, fault parameterization, and fault classification. In the preconditioning step, we use a 3D structure-oriented filter to suppress random noise, cross-cutting coherent noise, and sharpen the discontinuities.
- Suppress noise or stratigraphic anomalies subparallel to reflector dip
- Deep learning Convolutional Neural Networks (CNN) performs well on fault detection without any human-computer interactive work
- Sharpen fault and other discontinuities that cut reflectors, and parameterize fault attributes
- Fault classification by unsupervised machine learning methods
Summary
The case study introduces an integrated machine learning-based fault classification workflow that creates fault component classification volumes that greatly reduce the burden on the human interpreter. We:
- Computed a 3D fault probability volume from pre-conditioned seismic amplitude data using a 3D convolutional neural network (CNN)
- Characterized faults by their dip and azimuth, decomposed these two properties into four geodetic components
- Parameterized dip and azimuth as four continuous geodetic fault components. Projected four fault components as well as the fault probability on a self-organizing map (SOM) to generate a fault component classification
Method
For 3D visualization, a fault voxel in the enhanced CNN fault probability volume is defined by three parameters: the fault probability, ![]() , the fault dip magnitude,
, the fault dip magnitude, ![]() , and the fault dip azimuth,
, and the fault dip azimuth, ![]() . With those geodetic components decomposed from the fault dip and azimuth, the fault probability
. With those geodetic components decomposed from the fault dip and azimuth, the fault probability ![]() that represents the CNN fault classification for each voxel can then be converted to fault parameterized components:
that represents the CNN fault classification for each voxel can then be converted to fault parameterized components:

This transformation increases the number of variables from one continuous and two discontinuous parameters to four continuous parameters that can be smoothed, sharpened, and interpolated using simple algebraic techniques internal and amenable to machine learning.
Applications
We validate our workflow using seismic data acquired from western Australia. This dataset contains a complex polygonal fault system and many major normal faults. The seismic data is pre-conditioned with the 3D structure-oriented filter. Then, the original CNN fault probability volume is computed from the pre-conditioned data. Next, we apply the fault enhancement and skeletonization method to post-process the fault images.
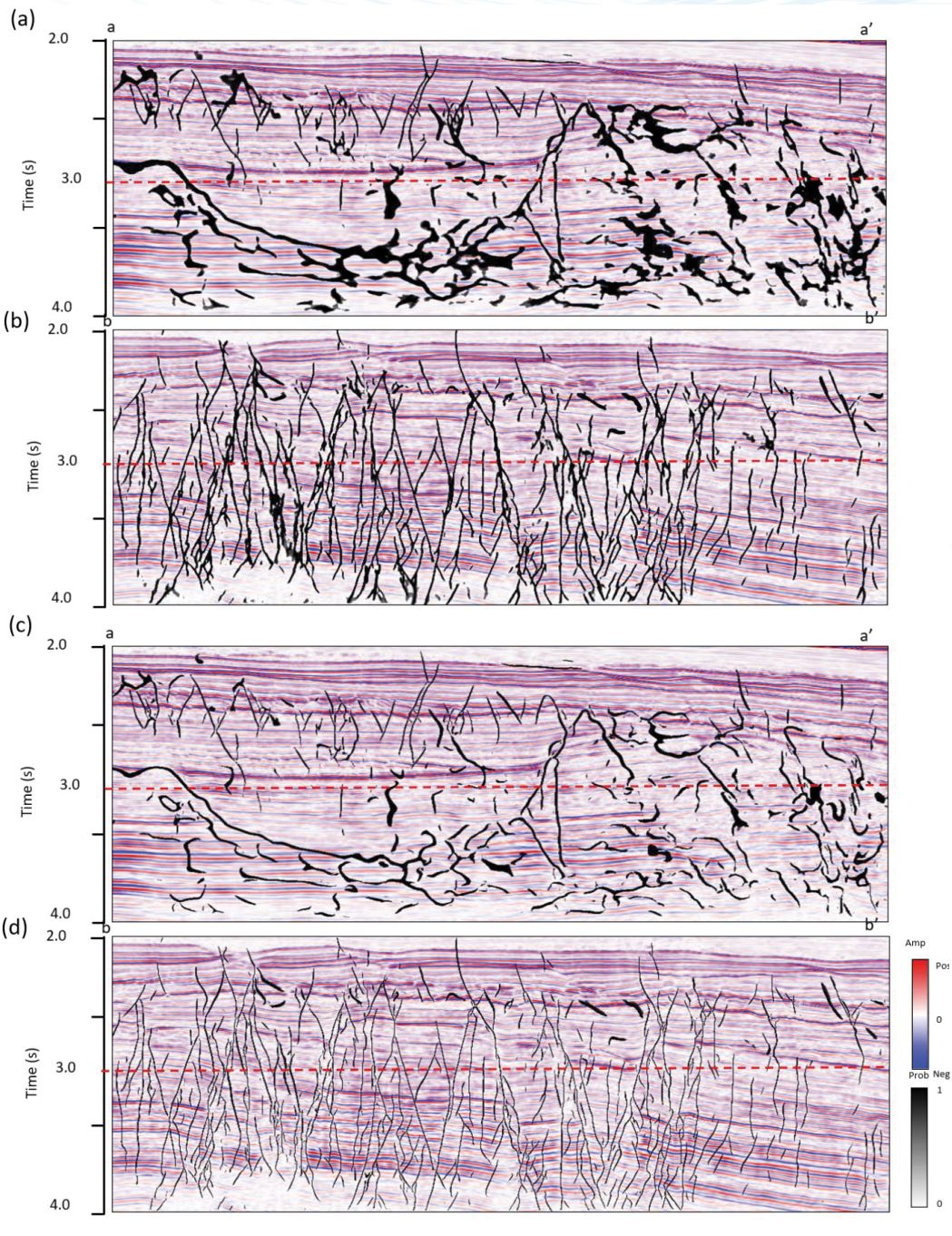
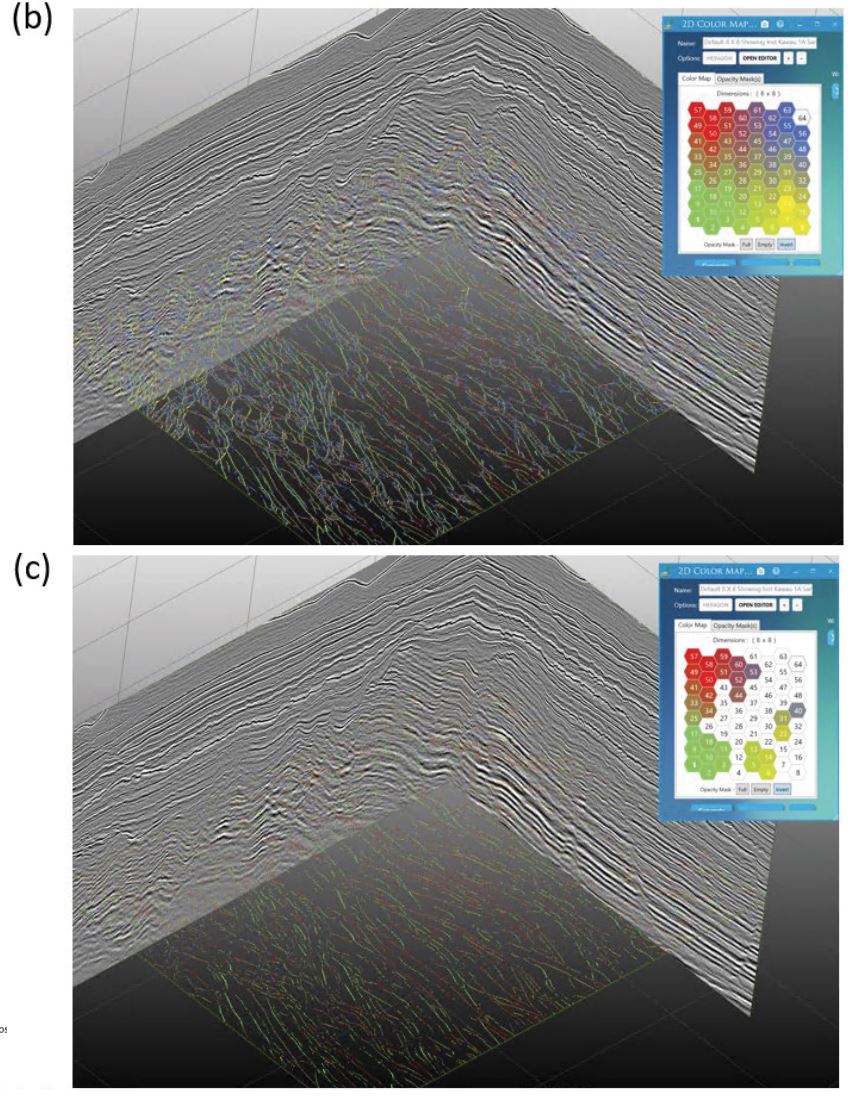
The overall fault patterns in the SOM results should be identical to the enhanced fault probability volume since the only inputs to the SOM are the four fault parameterized components. The 2D color map of SOM winning neurons classifies these fault components that are based on fault voxels in the enhanced fault probability volume. By turning off neuron 64, we note that all voxels that represent non-fault backgrounds are classified into the neuron 64 (Figure 4a and 4d). Figure 4c highlights the major faults by selecting clusters of neurons. By turning on other neurons, that minor faults and other small discontinuities are distinguished from the major faults, thus demonstrating this new workflow.
Conclusions
We have introduced a fully automated integrated deep learning-based fault classification workflow. We apply a deep learning-based fault detection method to compute the fault probability. We find that the SOM classification results segment fault sets trending allowing selection of interpreter-defined orientations and further isolation of stratigraphy and minimizing noise.
Acknowledgments
Figures from Qi, J., C. Laudon, and K. J. Marfurt, 2022, An integrated machine learning-based fault classification workflow: Second International Meeting for Applied Geoscience & Energy, SEG/AAPG, Expanded Abstracts, 1865-1869.